Omnidirectional Multisensory Perception Fusion for Long-Term Place Recognition
(ICRA 2018)
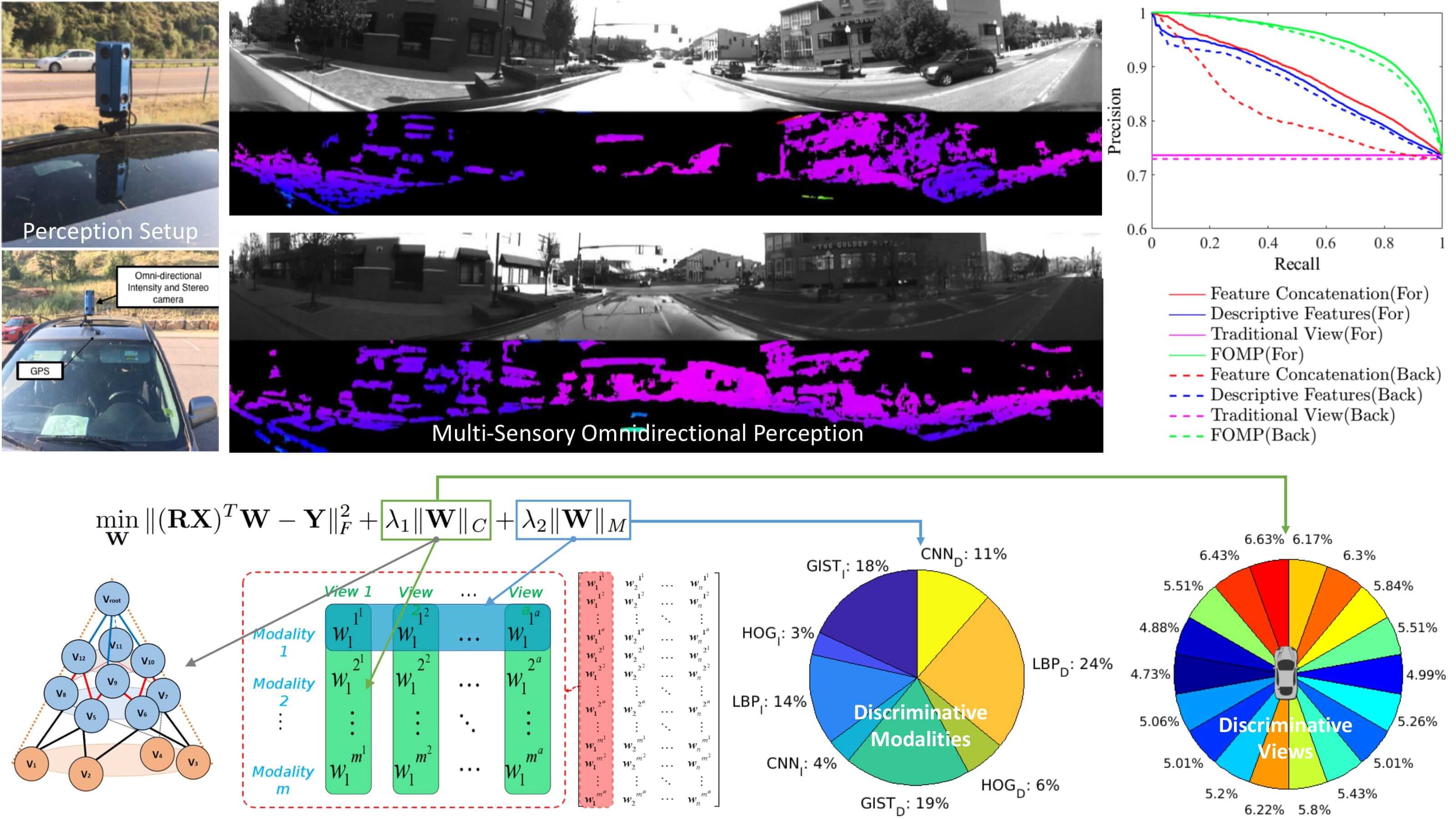
Abstract: Over the recent years, long-term place recognition has attracted an increasing attention to detect loops for largescale Simultaneous Localization and Mapping (SLAM) in loopy environments during long-term autonomy. Almost all existing methods are designed to work with traditional cameras with a limited field of view. Recent advances in omnidirectional sensors offer a robot an opportunity to perceive the entire surrounding environment. However, no work has existed thus far to research how omnidirectional sensors can help long-term place recognition, especially when multiple types of omnidirectional sensory data are available. In this paper, we propose a novel approach to integrate observations obtained from multiple sensors from different viewing angles in the omnidirectional observation in order to perform multi-directional place recognition in longterm autonomy. Our approach also answers two new questions when omnidirectional multisensory data is available for place recognition, including whether it is possible to recognize a place with long-term appearance variations when robots approach it from various directions, and whether observations from various viewing angles are the same informative. To evaluate our approach and hypothesis, we have collected the first large-scale dataset that consists of omnidirectional multisensory (intensity and depth) data collected in urban and suburban environments across a year. Experimental results have shown that our approach is able to achieve multi-directional long-term place recognition, and identifies the most discriminative viewing angles from the omnidirectional observation.